

Michał STYŁA, Dominik GNAŚ, Przemysław ADAMKIEWICZ
Centrum Badawczo-Rozwojowe Technologii Informatycznych (CBRTI sp. z o. o.), Rzeszów
Lubelska Akademia WSEI, Lublin
Wprowadzenie
Niniejsza rozprawa dotyczy wykorzystania analizy czasowej sygnałów ultra-szerokopasmowych w systemie lokalizacji w czasie rzeczywistym (RTLS). Główny nacisk położono na rozwiązania sprzętowe tagów, miniaturyzację i optymalizację zużycia energii. Omówiono również algorytmy odpowiedzialne za szacowanie lokalizacji aktywów, sposób zarządzania pozyskanymi danymi oraz metodologię ich przesyłania i przetwarzania. Przedstawiony typ sieci lokalizacyjnej może znaleźć zastosowanie we wszelkiego rodzaju systemach WMS (ang. Warehouse Managament System), a także stanowić alternatywę dla nawigacji wewnątrzbudynkowej opartej na cyklicznych pomiarach RSSI (ang. Received Signal Strength Indicator).
Opracowanie warstwy sprzętowej
Przewidywana struktura sieci urządzeń obejmowała dwa rodzaje elementów: tzw. kotwice i znaczniki. Kotwice to elementy o znanym i stałym położeniu w przestrzeni oraz o stałym i nieograniczonym dostępie do zasilania budynku i sieci lokalnej. Z kolei znaczniki to elementy przymocowane do obiektów śledzonych i lokalizowanych przez kotwice. Oba typy wykorzystują mikrokontrolery DWM firmy Qorwo oraz wspierające je mikrokontrolery bezprzewodowe nRF52832 (Bluetooth 5) w transmisji danych innych niż lokalizacyjne. Pozostałe rodzaje danych przesyłanych poza pasmem UWB można uznać za odczyty z czujników środowiskowych zainstalowanych na każdym znaczniku. Jedynym wyjątkiem jest akcelerometr, którego sygnał wykorzystywany jest jedynie do wybudzania urządzenia z głębokiego uśpienia w celu oszczędzania wbudowanego w znacznik akumulatora. Jest to kluczowa procedura, ponieważ zapobiega zużywaniu ogniwa przy braku ruchu obiektu. Próg zadziałania akcelerometru można regulować w szerokim zakresie w zależności od warunków aplikacji. Inne kluczowe funkcje obejmują zintegrowaną antenę UWB zoptymalizowaną pod kątem częstotliwości środkowej 6,5 GHz (kanał 3) i szerokości pasma 500 MHz, szereg filtrów mocy i sygnału oraz oddzielną linię transmisyjną z obwodami dopasowującymi i anteną do pracy w paśmie 2,4 GHz. Ostateczny wygląd urządzeń zaprezentowano na rysunku 1.
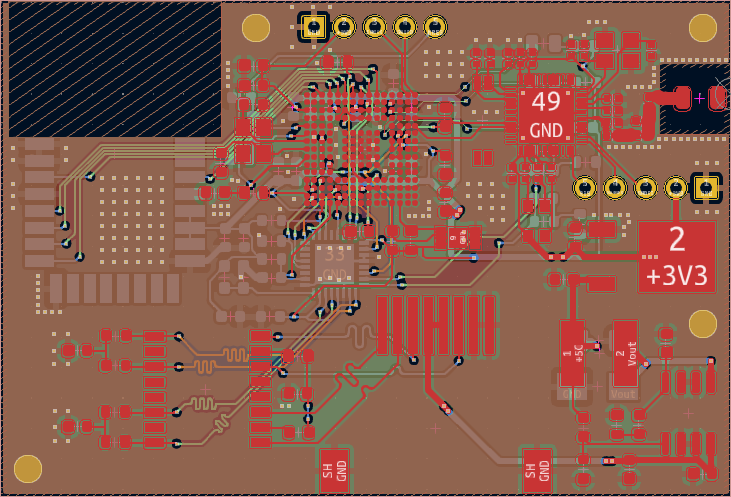

Rys. 1. Autorskie rozwiązania sprzętowe stworzone w ramach projektu: (a) – mozaika połączeń elektrycznych kotwicy ultra-szerokopasmowej, (b) – rzeczywiste prototypy kotwicy UWB (po lewej) i tagów UWB (po prawej).
Porównanie algorytmów lokalizacyjnych i wyników
Przeanalizowano dwa nowo opracowane algorytmy z punktem odniesienia w postaci metody do wyznaczania punktów w przestrzeni za pomocą układu trójkątów (trilateracja). Pierwszy z nich można nazwać trilateracją wspomaganą uczeniem maszynowym (MLET), a drugi lokalizacją przez optymalizację (LBO). Metoda wykorzystująca MLET pobiera każdą parę kotwic i odpowiadające im odległości, a następnie znajduje odpowiednie przecięcia okręgów. Nienadzorowany algorytm uczenia maszynowego – DBSCAN – pobiera następnie zestaw przecięć i dzieli punkty na istotne i odstające. Środek odpowiedniego klastra jest zlokalizowaną pozycją zwracaną przez metodę. Druga metoda – LBO – wykorzystuje inne podejście. Konstruuje ona funkcję celu z równań odległości każdej kotwicy. W idealnej sytuacji funkcja ta całkowicie zniknęłaby w rozwiązaniu. Należy jednak ponownie podkreślić, że algorytm ma do czynienia z zaszumionymi danymi, więc globalne minimum funkcji celu odpowiada najlepszemu przybliżeniu pozycji użytkownika. Rysunek 2 przedstawia podsumowanie wartości błędów pozycjonowania dla serii 80 próbek. Uzyskane wykresy wyraźnie pokazują, że trilateracja daje gorsze wyniki niż pozostałe dwie metody. Błąd sięga nawet 50 cm dla trilateracji, podczas gdy MLET i LBO nie przekraczają 30 cm. Z kolei tabela 1 podsumowuje uśrednione wartości błędów dla wszystkich serii pomiarowych i typów algorytmów obliczeniowych. Pokazują one 25% przewagę algorytmów MLET i LBO nad tradycyjną trilateracją.
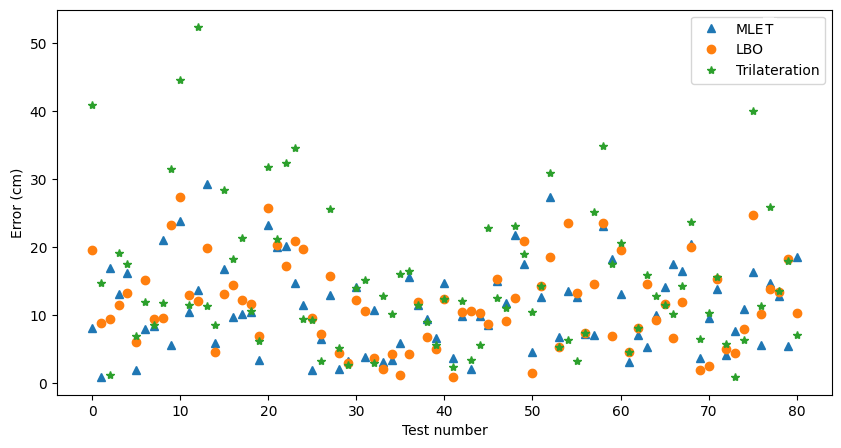
Rys. 2. Porównanie błędów pomiaru pozycji – rozbieżność między rzeczywistą, a obliczoną pozycją urządzenia dla trzech wybranych metod.
| Method | Trilateracja | MLET | LBO |
| Średni błąd (cm) | 15.21 | 11.31 | 11.66 |
Tabela 1. Porównanie średnich wartości błędów uzyskanych w wyniku działania trzech wybranych algorytmów.
Bibliografia
- Fernandes J. R., Wentzloff D.: Recent Advances in IR–UWB transceivers: An overview, Proceedings of 2010 IEEE International Symposium on Circuits and Systems, 30 May 2010 – 02 June 2010, 2010.
- Sasaki N., Kimoto K., Moriyama W., Kikkawa T.: A Single-Chip Ultra-Wideband Receiver With Silicon Integrated Antennas for Inter-Chip Wireless Interconnection, IEEE Journal of Solid-State Circuits, vol. 44, no. 2, pp. 382–393, 2009.
- Gnaś D., Adamkiewicz P.: Indoor localization system using UWB, Informatyka, Automatyka, Pomiary W Gospodarce I Ochronie Środowiska, vol. 12, no. 1, pp. 15–19, 2022.
- Saeidi T., Ismail I., Wen W. P., Alhawari A. R. H., Mohammadi A.: Ultra-Wideband Antennas for Wireless Communication Applications, International Journal of Antennas and Propagation, 2019.
- Lee Y., Kim J. Lee H., Moon K.: IoT-based data transmitting system using a UWB and RFID system in smart warehouse, 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), 04-07 July 2017, 2017.