

Michał STYŁA, Dominik GNAŚ, Przemysław ADAMKIEWICZ
Information Technology Research & Development Centre (CBRTI sp. z o. o.), Rzeszów
WSEI University, Lublin
Introduction
This thesis addresses the use of temporal analysis of ultra-wideband signals in a real-time localisation system (RTLS). The main focus is on tag hardware solutions, miniaturisation and energy optimisation. It also addresses the algorithms responsible for estimating the user’s location, how to manage the acquired data, and the methodology for its transfer and processing. The type of location network presented can find application in all kinds of WMS (Warehouse Managament System) systems, as well as an alternative to in-building navigation based on cyclic RSSI measurements (Received Signal Strength Indicator).
Development of the hardware layer
The envisaged structure of the equipment network included two types of elements: so-called anchors and markers. Anchors are elements with a known and fixed position in space, and with permanent and unrestricted access to the building’s power supply and local network. Tags, on the other hand, are elements attached to objects tracked and localised by anchors. Both types incorporate the use of Qorwo’s DWM microcontrollers and the nRF52832 (Bluetooth 5) wireless microcontrollers supporting them in non-localisation data transmission. Other types of data transmitted outside the UWB band can be considered as readings from environmental sensors installed on each tag. The only exception is the accelerometer, whose signal is only used to wake the device from deep sleep in order to save the tag’s built-in battery. This is a crucial procedure as it prevents the battery from being consumed in the absence of object movement. The accelerometer’s trip threshold is adjustable over a wide range depending on the application conditions. Other key features include an integrated UWB antenna optimised for 6.5 GHz centre frequency (channel 3) and 500 MHz bandwidth, a series of power and signal filters, and a separate transmission line with matching circuits and antenna for 2.4 GHz band operation. The final appearance of the devices is shown in Figure 1.
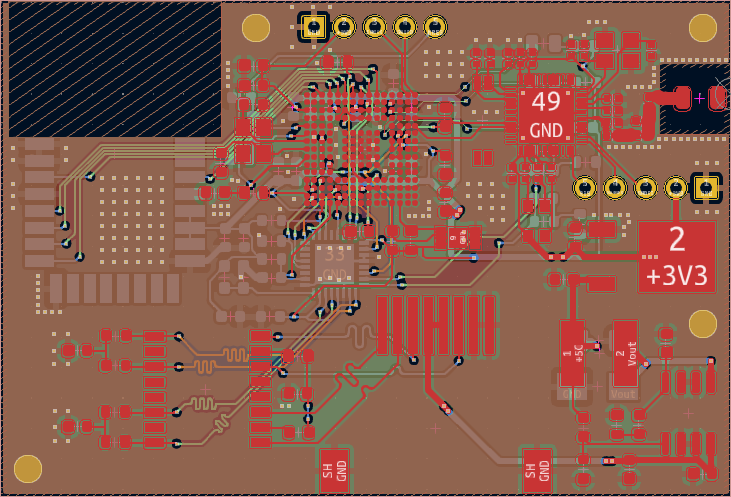

Fig. 1 1. Author’s coupling solutions created in the project: (a) – mosaic of electrical connections of the ultra-wideband anchor, (b) – actual prototypes of the UWB anchor (left) and UWB tags (right).
Comparison of positioning algorithms & results
Two newly developed algorithms with a reference point in the form of a trilateration method for determining points in space using a system of triangles (trilateration) are analysed. The first can be called machine learning-assisted trilateration (MLET), while the second is localisation by optimisation (LBO). The method using MLET takes each pair of anchors and their corresponding distances and then finds the corresponding circle intersections. An unsupervised machine learning algorithm – DBSCAN – then takes the set of intersections and divides the points into relevant and outliers. The centre of the relevant cluster is the localised position returned by the method. The second method – LBO – uses a different approach. It constructs a goal function from the distance equations of each anchor. Ideally, this function would completely disappear for the solution. However, it should be stressed again that the algorithm is dealing with noisy data, so the global minimum of the objective function corresponds to the best approximation of the user’s position. Figure 2 shows a summary of the positioning error values for a series of 80 samples. The resulting diagrams clearly show that trilateration returns worse results than the other two methods. The error reaches up to 50 cm for trilateration, while MLET and LBO do not exceed 30 cm. In turn, Table 1 summarises the averaged error values for all measurement series and calculation algorithm types. These show a 25% advantage of the MLET and LBO algorithms over traditional trilateration.
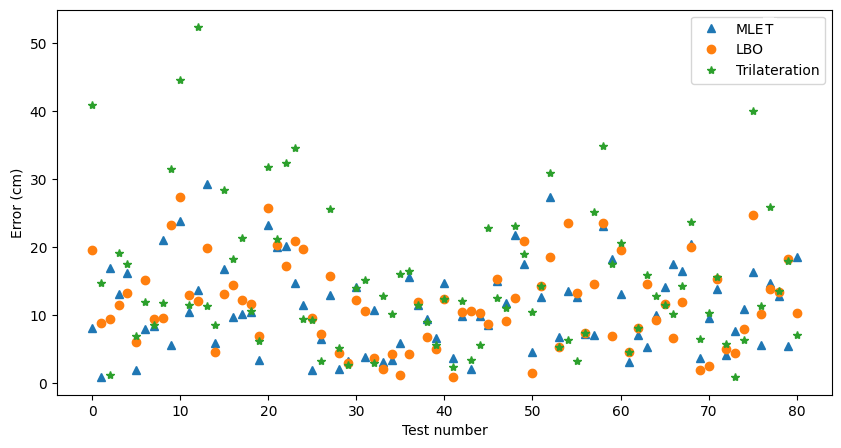
Fig. 2 2. Position errors – distance between actual and calculated position of the device for the three selected methods.
| Method | Trilateracja | MLET | LBO |
| Mean error (cm) | 15.21 | 11.31 | 11.66 |
Table 1. Comparison of mean error values obtained from the operation of the three selected algorithms.
Bibliography
- Fernandes J. R., Wentzloff D.: Recent Advances in IR–UWB transceivers: An overview, Proceedings of 2010 IEEE International Symposium on Circuits and Systems, 30 May 2010 – 02 June 2010, 2010.
- Sasaki N., Kimoto K., Moriyama W., Kikkawa T.: A Single-Chip Ultra-Wideband Receiver With Silicon Integrated Antennas for Inter-Chip Wireless Interconnection, IEEE Journal of Solid-State Circuits, vol. 44, no. 2, pp. 382–393, 2009.
- Gnaś D., Adamkiewicz P.: Indoor localization system using UWB, Informatyka, Automatyka, Pomiary W Gospodarce I Ochronie Środowiska, vol. 12, no. 1, pp. 15–19, 2022.
- Saeidi T., Ismail I., Wen W. P., Alhawari A. R. H., Mohammadi A.: Ultra-Wideband Antennas for Wireless Communication Applications, International Journal of Antennas and Propagation, 2019.
- Lee Y., Kim J. Lee H., Moon K.: IoT-based data transmitting system using a UWB and RFID system in smart warehouse, 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), 04-07 July 2017, 2017.