

Michał STYŁA, Dominik GNAŚ, Przemysław ADAMKIEWICZ
Centrum Badawczo-Rozwojowe Technologii Informatycznych (CBRTI sp. z o. o.), Rzeszów
Lubelska Akademia WSEI, Lublin
Wprowadzenie
Projekt polegał na wykorzystaniu fal elektromagnetycznych w paśmie 5,8 GHz oraz technologii tomografii radiowej do wykrywania osób przebywających w pomieszczeniach przy użyciu metod refleksyjnych. Działania obejmowały stworzenie koncepcji warstwy sprzętowej, struktury i hierarchii sieci przesyłu danych, a także metody przetwarzania pozyskanych przebiegów na użyteczne informacje. Pozyskane dane (w postaci próbek odbitego sygnału) były przesyłane do silnika lokalizacyjnego umieszczonego na serwerze testowym, a następnie konwertowane na informacje o lokalizacji użytkowników. Metody analizy amplitudy i częstotliwości sygnałów w celu wykrycia czynnika ludzkiego, struktura płytki drukowanej i anteny mikrofalowej oraz metody efektywnego zarządzania próbkami danych w celu uzyskania systemu zbliżonego do RTLS (ang. Real Time Location System) były podstawowymi zagadnieniami do rozwiązania.
Konstrukcja urządzenia
Centralnym punktem urządzenia jest transceiver MAX2828ETN+, który jest układem typu front-end, tj. bez wewnętrznej jednostki sterującej w postaci mikrokontrolera, ale sterowany zewnętrznie za pomocą rejestrów i zawartych w nich wartości bitów/flag. Ścieżki nadawania i odbioru są oddzielone od siebie i niezależnie sterowane. Funkcje sterowania nadrzędnego zapewnia mikrokontroler WSoC nRF52832 (ang. Wireless System on a Chip). Pełni on dodatkową funkcję przesyłania odczytów z czujników środowiskowych za pośrednictwem Bluetooth 5. Pozostałe zastosowane komponenty to zintegrowane obwody filtrujące i kondycjonujące w. cz., a także zintegrowane źródła sygnału referencyjnego do synchronizacji lub syntezy innych sygnałów. Sygnał o częstotliwości nośnej może być wyprowadzony i doprowadzony do obwodu za pośrednictwem anteny mikrofalowej typu quad-patch, która jest przymocowana do płytki drukowanej za pomocą złącza SMA lub metodą „na kanapkę” za pośrednictwem przekładek i specjalnych zakończeń linii nadawczo-odbiorczej. Ostateczne parametry urządzenia ustalono na laminacie o wymiarach 106 x 80 x 1,6 mm, mocy promieniowanej 10 mW i efektywnym zasięgu 10 metrów. Ostateczny wygląd urządzenia pokazano na rysunku 1.
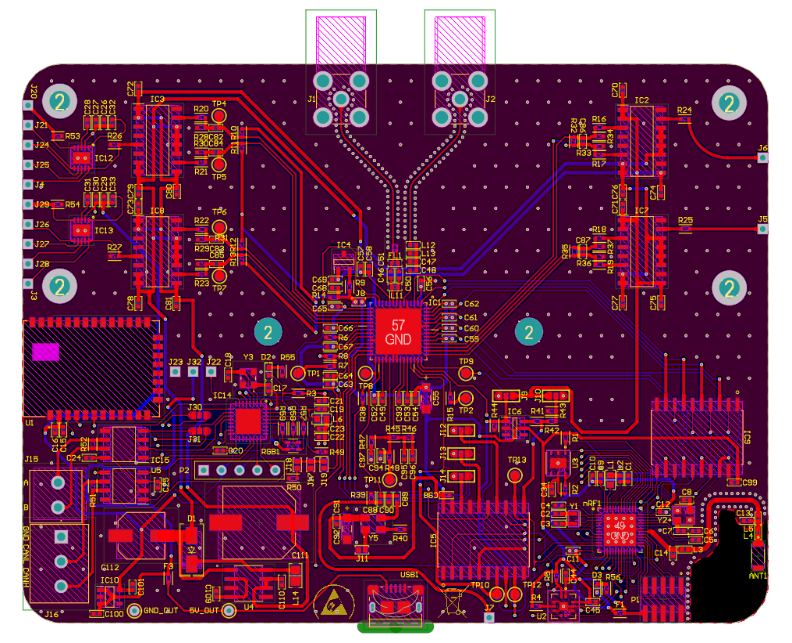

Rys. 1. Prototyp radiowej sondy refleksyjnej: (a) – mozaika połączeń elektrycznych, (b) – rzeczywisty egzemplarz.
Przetwarzanie sygnału i wyniki
Informacje o położeniu użytkownika zostały określone na podstawie sieci nadajników składającej się z 16 sond refleksyjnych w układzie okalającym pomieszczenie, co jest charakterystyczne dla tomografii. Fale odbite od obiektów powracających do detektora są wzmacniane i filtrowane, a następnie przekazywane do obwodu, który zmniejsza ich częstotliwość tak, aby mogły być z powodzeniem próbkowane przez przetwornik ADC (ang. Analog to Digital Converter). Magistrala CAN (ang. Controller Area Network) i bramka dostępowa z dostępem do sieci lokalnej budynku odpowiadały za transport danych do silnika lokalizacyjnego znajdującego się na serwerze obliczeniowym. Każdy pakiet zawierający próbkę sygnału był wyposażony w informacje o numerze sondy, a także znacznik czasu w celu zachowania synchronizacji/spójności zestawów danych. Przykładowe wizualizacje uzyskane z analizy amplitudy i częstotliwości sygnałów przedstawiono na rysunku 2. Jednym z punktów wyjścia dla przetwarzania sygnału było odniesienie amplitudy do odległości od detektora/obecności przy detektorze, a drugim było wykorzystanie zjawiska Dopplera do ruchu obiektu. Skrajnie niekorzystne przypadki ruchu równoległego do detektora były równoważone odczytami z innych sond, w których wykazany ruch były bardziej jednoznaczny. Zanik ruchu poniżej pewnego progu powodował zapamiętanie ostatniej znanej pozycji obiektu i znaczne zmniejszenie prędkości pomiarowej. Pełna prędkość była wyzwalana w momencie gdy wartości na oscylogramach ponownie zaczęły się zmieniać powyżej zadanego progu. Maksymalna reakcja sond refleksyjnych została wywołana w obrębie wzorca promieniowania ich anten mikrofalowych, tj. 45 stopni w poziomie i 30 stopni w pionie, co dało ostateczną dokładność od 40 do 50 cm, w zależności od panujących warunków.
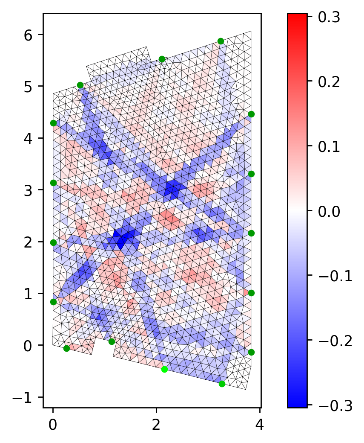
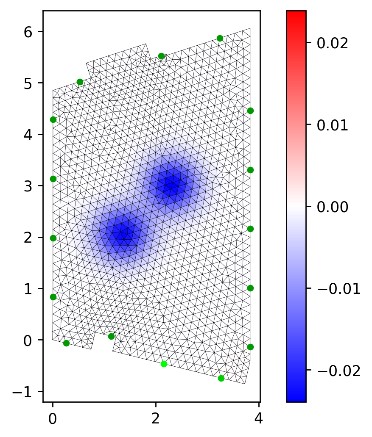
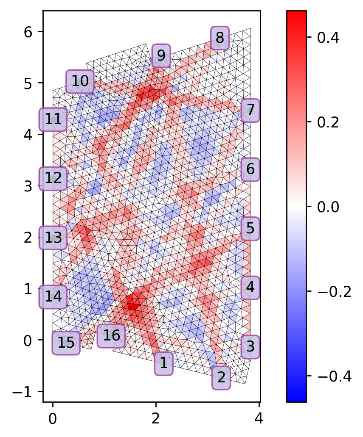
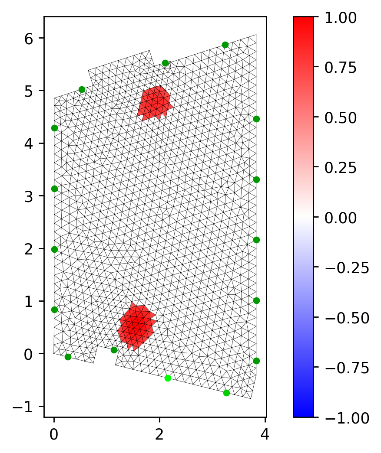
Rys. 2. Wizualizacja pozycji użytkowników na podstawie analizy amplitudy i częstotliwości przebiegów (jednostki względne): (a) – bezpośredni wynik TSVD (scenariusz statyczny I), (b) – bezpośredni wynik TSVD z filtracją gaussowską (scenariusz statyczny I), (c) – bezpośredni wynik TSVD (scenariusz statyczny II), (d) – bezpośredni wynik TSVD z filtracją Mexican Hat (scenariusz statyczny II).
Bibliografia
- Brodeski D., Bilik I., Giryes R.: Deep Radar Detector, 2019 IEEE Radar Conference (RadarConf), 22–26 April 2019.
- Wnuk M., Chudy Z.: Pomiar mocy impulsu elektromagnetycznego mikrofal, Przegląd Elektrotechniczny, vol. 90, no. 8, pp. 239–242, 2014.
- Bilik I., Bialer O., Villeval S., Sharifi H., Kona K., Pan M., Persechini D., Musni M., Geary K.: Automotive MIMO radar for urban environments, 2016 IEEE Radar Conference (RadarConf),02–06 May 2016
- Zhang C., Luo W., Urtasun R.: Efficient Convolutions for Real Time Semantic Segmentation of 3D Point Clouds, In Proc. International Conference on 3D Vision (3DV), 2018.
- Styła M., Kiczek B., Kłosowski G., Rymarczyk T., Adamkiewicz P., Wójcik D., Cieplak T.: Machine Learning-Enhanced Radio Tomographic Device for Energy Optimization in Smart Buildings, Energies, vol. 16, no. 1, p. 275, 2022.