
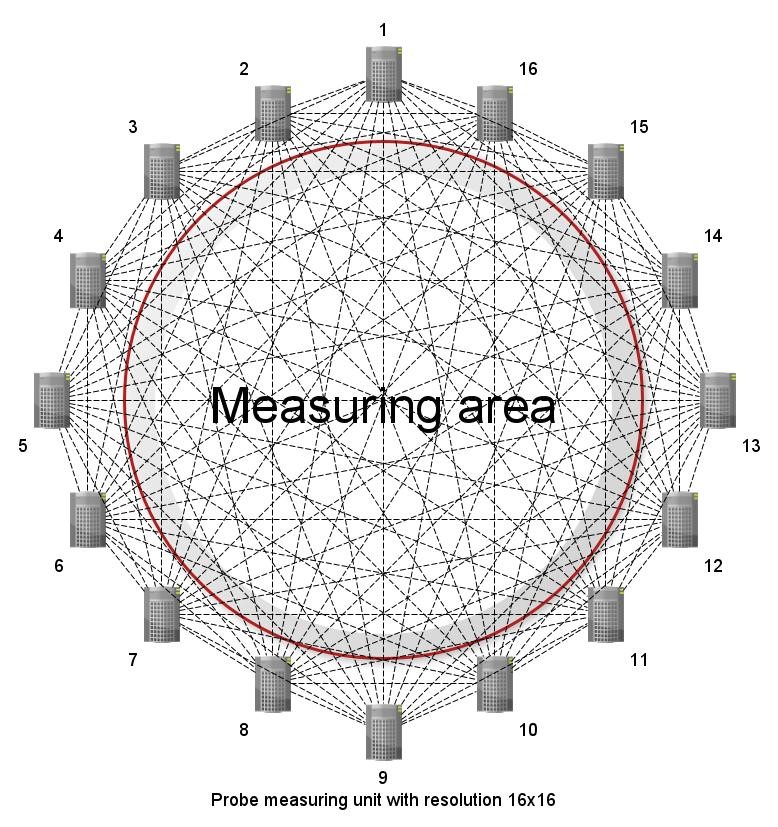
Rys. 1. Wszystkie kąty projekcji i wynikająca z nich siatka w systemie tomografu radiowego 16×16
Michał Styła
1Centrum Badawczo-Rozwojowe Netrix S.A., Lublin, Polska,
2Uniwersytet Ekonomiczny i Innowacji, Lublin, Polska
Słowa kluczowe: Jednoczesna lokalizacja i mapowanie, Nawigacja w pomieszczeniach, Tomografia, Rekonstrukcja obrazu, Układy scalone o częstotliwości radiowej, Bluetooth
Wprowadzenie
Tomografia to słowo łączące w sobie dwa inne pochodzące z greki, czyli przekrój (tomé) i zapisywać (gráfein). Jako proces zawsze ma na celu otrzymanie przekroju danego obiektu za pomocą względnie bezinwazyjnego medium. W praktyce oznacza to nienaruszalność integralności materiałowej badanego obiektu.
Stworzony system tomograficzny jako medium transmisyjnego używa fal elektromagnetycznych o częstotliwości 2.4 GHz i mocy nie przekraczającej 6.3 mW (+8 dBm). Wybrany zakres częstotliwości bardzo dobrze sprawdza się w detekcji obiektów organicznych ze względu na wysoki stopień pochłanialności przez wodę. Moc jest wystarczająca, aby system mógł pokrywać swoim działaniem pomieszczenia o małych i średnich rozmiarach. System daje się z powodzeniem przeskalowywać za pomocą modułów o większej mocy lub anten posiadających większe zyski energetyczne.
- Algorytm pomiarowy radiotomografu
Model przedstawiający algorytm działania tomografu radiowego prezentuje rysunek 1. Stworzony system może się składać z dowolnej liczby radiowych sond pomiarowych (w testowanym przypadku szesnastu), które za pomocą wskaźnika RSSI (Received Signal Strength Indication) są w stanie dokonać dwuwymiarowego mapowania przestrzeni.
Sondy naprzemiennie łącząc się ze sobą i wymieniając dane tworzą poszczególne kąty projekcji, które pod koniec procesu układają się w siatkę pomiarową. Jej gęstość jest ściśle uzależniona od liczby użytych sond radiowych oraz sposobu ich rozmieszczenia względem siebie i bryły pomieszczenia. Aby uniknąć kolizji strumieni danych na poszczególnych kątach projekcji oprogramowanie sond radiowych zostało pozbawione zdolności decyzyjnych w stosunku do wykonywanych pomiarów. Obciążenie kontrolą i obowiązkiem utrzymania integralności danych zostało w ten sposób przekazane centralnej jednostce sterującej.
- Warstwa sprzętowa
Najmniejszą komórką budującą stworzony system jest tomograficzna sonda radiowa przedstawiona na rysunku 2. Na powierzchni PCB sondy można wyróżnić trzy podstawowe sekcje.
Lewy górny róg zajmuje sekcja zasilająca wyposażona w kontroler ładowania ogniw galwanicznych, sygnalizację procesów energetycznych zrealizowaną za pomocą diod elektroluminescencyjnych, a także ustandaryzowany port w postaci USB micro. Proces ładowania ogniwa można rozpoznać za pomocą ciągłego świecenia się pomarańczowej kontrolki, znajdującej się w lewym dolnym rogu urządzenia (rysunek 4). Całość została zabezpieczona przed zwarciem za pomocą bezpiecznika topikowego.
Po przeciwległej stronie PCB została ulokowana sekcja kontrolno – obliczeniowa, której najważniejszym elementem jest mikrokontroler STM32 z wysokowydajnej energetycznie serii L0 zbudowanej w opraciu o rdzenie ARM Cortex M0+. W tym miejscu zbiegają się wszystkie porty komunikacyjne urządzenia. Przeprogramowania mikrokontrolera można w każdej chwili dokonać za pomocą wyprowadzonego na bok złącza programatora STLink/V2. Stanowi ono też alternatywną drogę zasilania dla sondy. W momencie utraty połączenia z urządzeniem resetowanie można wymusić za pomocą przycisku znajdującego się w prawym górnym rogu PCB. W celu zwiększenia zdolności adaptacyjnych układu, w prawym dolnym rogu dodano trzy przyciski sterujące do zastosowań ogólnych, zależnych od wersji oprogramowania znajdującego się w pamięci mikrokontrolera.
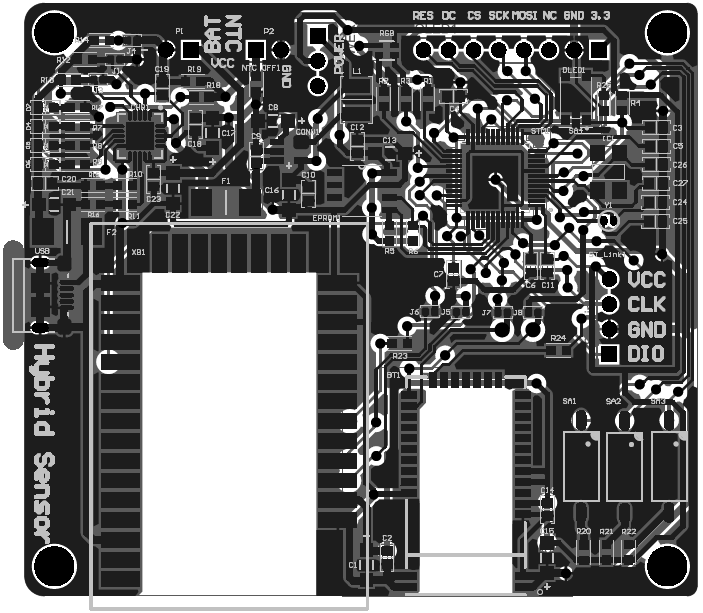
Rys. 2. Mozaika PCB sondy radiotomograficznej zaprojektowanej na potrzeby systemu nawigacji pokojowej
Ostatnim obszarem są powierzchnie całkowicie pozbawione warstw miedzi (białe pola na rysunku 2). Zajmowane są przez moduły komunikacyjne Bluetooth oraz XBee. Zostały skonfigurowane w taki sposób, aby jak najlepiej świadczyć usługi na rzecz tomografii radiowej. Każdy z modułów posiada swoją własną antenę nadawczo – odbiorczą, co pozwala na niezależną pracę obu standardów komunikacyjnych jednocześnie. Dodatkowo, aby zwiększyć liczbę równolegle wykonywanych operacji (co ma bezpośrednie przełożenie na ogólną prędkość systemu) wszystkie interfejsy UART między modułami skonfigurowano w trybie full-duplex.
Sygnalizacja trybu pracy i stanu tomografu radiowego została zrealizowana za pomocą diody elektroluminescencyjnej RGB. Kolor zielony sygnalizuje wykorzystywanie przez tomograf modułu bezprzewodowego XBee, a kolor niebieski został zarezerwowany dla sygnalizowania aktywności modułu Bluetooth. W trakcie wykonywania pomiaru, na krótko zapalany jest kolor czerwony, co ułatwia użytkownikowi obserwację i analizę systemu w czasie pracy.
- Integracja elementów systemu
Integracja systemu zrealizowana została za pomocą centralnej jednostki sterującej zbudowanej z jednoukładowego komputera Raspberry Pi Zero W wyposażonego w komunikację Bluetooth i Wi-Fi. Wzbogacenie układu o obsługę komunikacji z modułami XBee wymagało zaprojektowania oddzielnego adaptera. Całość (razem z mocowaniem anteny dookólnej wyprowadzonej na zewnątrz) została zamknięta w specjalnej obudowie wyposażonej w odprowadzenie ciepła.
Centralna jednostka sterująca zapewnia poprawną kolejność wykonywania pomiarów, akwizycję danych pomiarów, wstępną obróbkę i wysyłkę tych danych na oddolnie wybraną platformę za pomocą sieci Wi-Fi i protokołu MQTT oraz szybszą detekcję błędów pomiarowych. Dzięki zastosowaniu takiej hierarchii między urządzeniami, rekonstrukcja może być wykonywana na dowolnie wybranej jednostce obliczeniowej pod warunkiem, że jest ona w stanie poprawnie zinterpretować dane przekonwertowane do standardu JSON.
- Rekonstrukcja pomieszczenia
Proces rekonstrukcji pomieszczenia przebiega w ściśle sekwencyjny sposób. W pierwszym kroku centralna jednostka sterująca wymusza na każdej poszczególnej sondzie radiowej wymianę danych odnośnie wskaźnika RSSI ze wszystkimi pozostałymi sensorami opasującymi obszar badany. W ten sposób z każdej pojedynczej sondy jednostka centralna uzyskuje po jednym wierszu macierzy pomiarowej (rysunek 3). Dane zostają poddane działaniu analizatora składniowego napisanego w języku Python 2.7 i przygotowane do transmisji w kierunku serwera MQTT.
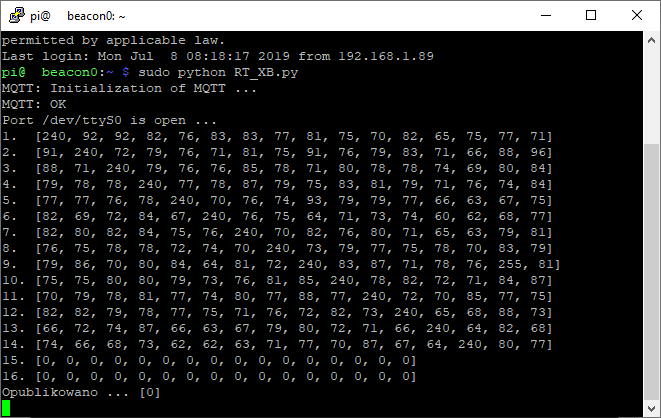
Rys. 3. Oprogramowanie zaimplementowane w centralnej jednostce sterującej podczas akwizycji danych pomiarowych
Aby system był zdolny do detekcji obiektów naruszających przestrzeń pomieszczenia w pierwszej kolejności tomograf musi przeprowadzić pomiar tzw. tła. Tło stanowi rekonstrukcję pomieszczenia służącą jako element porównawczy dla każdej następnej. Proces ten można przyrównać do kalibrowania przyrządu pomiarowego. Pomiar tła stanowi obraz pomieszczenia nienaruszonego przez żadne organizmy żywe i nie stałe elementy otoczenia, dzięki czemu nie musi być wykonywany przy każdorazowym uruchomieniu systemu. W przedstawionej konfiguracji jest przechowywany jako gotowy wzorzec na urządzeniu końcowym (rekonstruującym). Analiza porównawcza w połączeniu z wykorzystaniem elementów obliczeniowych takich jak regularyzacja Tichonowa czy filtr Mexican Hat pozowoliła na uzyskanie widoku zaprezentowanego na rysunku 5.
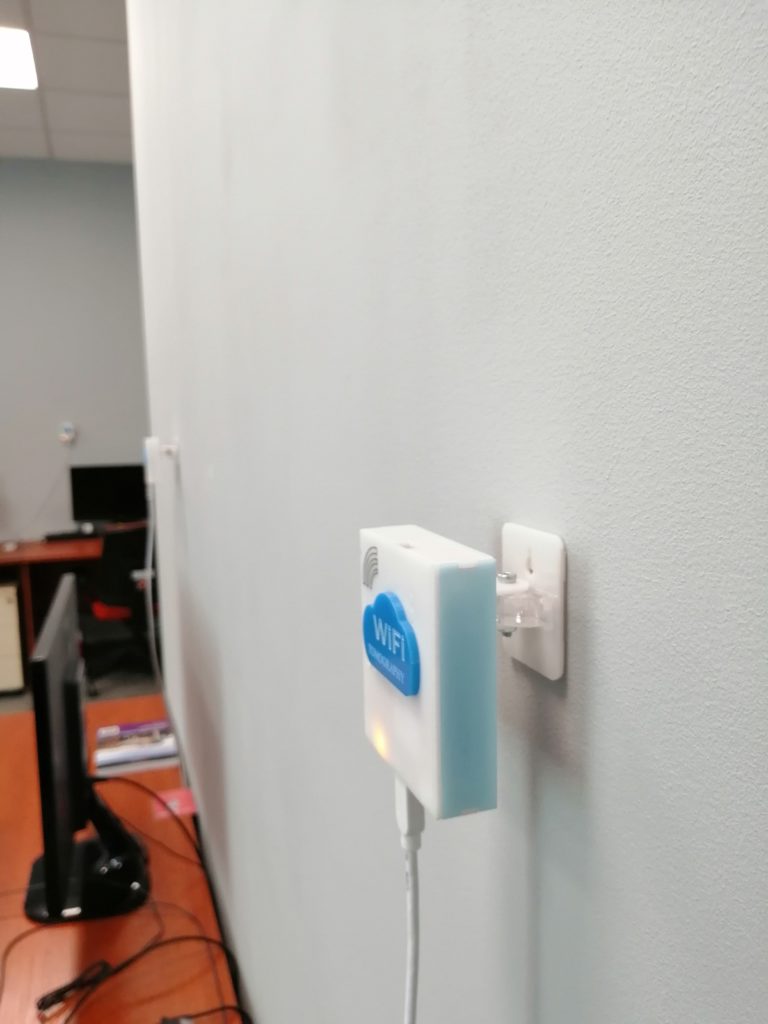
Rys. 4. Widok sposobu wykonania fragmentu radiotomografu w badanym pomieszczeniu
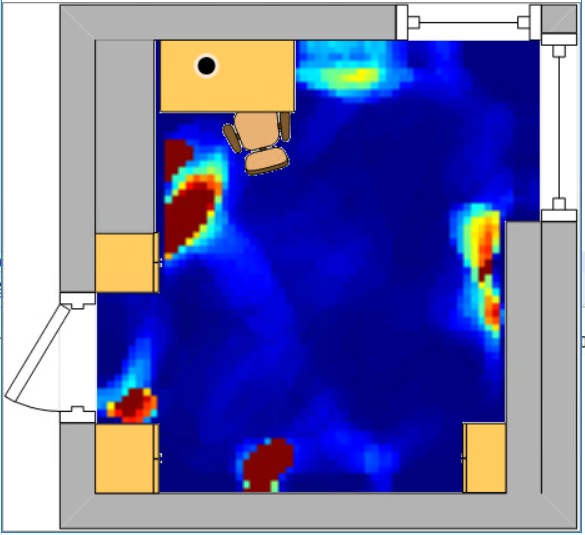
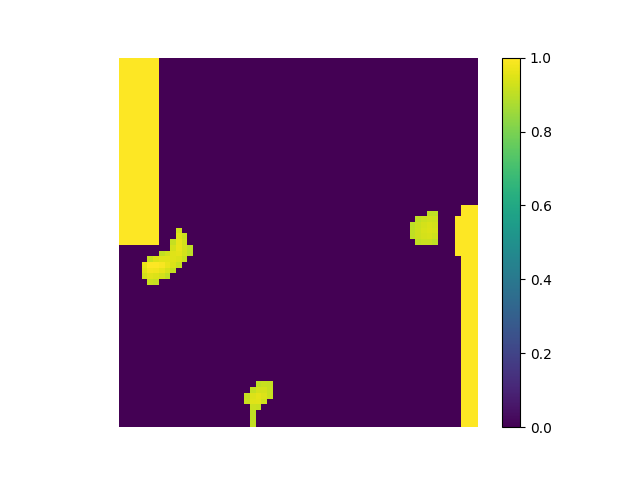
Rys. 5. Rekonstrukcja pomieszczenia (na górze) i mapa cieplna (na dole) uzyskana za pomocą tomografu radiowego
- Podsumowanie
Wykorzystanie wszystkich wcześniej opisanych elementów do konstrukcji tomografu radiowego poskutkowało stworzeniem w pełni skalowalnego i elastycznego systemu wspomagającego obrazowanie pomieszczeń za pomocą fal elektromagnetycznych. Za pomocą wspólnych mianowników w postaci standardów takich jak Bluetooth, XBee czy Wi-Fi tomograf można w prosty sposób uczynić częścią większych sieci nawigacyjnych zwiększając w ten sposób ich dokładność.
Bibliografia
- Maj M., Rymarczyk T., Kania K., Niderla K., Styła M., Adamkiewicz P.: Application of the Fresnel zone and Free-space Path for image reconstruction in radio tomography, International Interdisciplinary PhD Workshop 2019, IIPhDW 2019, 15 – 17 May 2019, Wismar, Germany.
- Rymarczyk T., Styła M., Oleszek M., Maj M., Kania K., Adamkiewicz P.: Object detection using radio imaging tomography and tomographic sensors, Przegląd Elektrotechniczny, ISSN 0033-2097, R. 96 NR 1/2020