
Centrum Badawczo-Rozwojowe Netrix S.A., Lublin, Polska,
Wyższa Szkoła Ekonomii i Innowacji w Lublinie
Michał Styła
Słowa kluczowe: Układy scalone o częstotliwości radiowej, radiokomunikacja wewnętrzna, radionawigacja, tomografia, propagacja elektromagnetyczna, Bluetooth
Wprowadzenie
Hybrydowy system nawigacji to bezprzewodowa sieć składająca się z zadanej liczby radiowych sond pomiarowych oraz towarzyszących im urządzeń nadzorczych. Łączy w sobie cechy trzech technologii radiowych: Bluetooth, Wi-Fi i XBee (protokół IEEE 802.15.4). System obejmuje swoim działaniem pasmo radiowe ISM (ang. Industrial, Scientific, Medical) 2,4 GHz, które sprawdza się w celach detekcji istot żywych w pomieszczeniach zamkniętych ze względu na wysoki procent zawartości wody w organizmach. W mniejszym stopniu system może być także użyty do detekcji przedmiotów nieożywionych w zależności od tego, z jakiego materiału są wykonane. Wynika to z natury fali elektromagnetycznej i jej tendencji do bycia odbijaną i pochłanianą zależnie od rodzaju materii, na którą natrafia. Podstawowym zadaniem systemu jest zagwarantowanie wszystkim użytkownikom znajdującym się w zasięgu systemu danych niezbędnych do ustalenia ich lokalizacji względem monitorowanego obiektu. W przypadku wkroczenia użytkownika do pomieszczenia system może dodatkowo zwiększyć swoją dokładność namierzania za pośrednictwem tomografii radiowej, której algorytmy zostały zaimplementowane w układach elektronicznych.
- Struktura systemu nawigacji
Struktura systemu nawigacji nie utrzymuje trwałych połączeń sieciowych między urządzeniami, a jej działanie oparte jest o technologię Bluetooth i standard typu Beacon. W praktyce oznacza to, że hybrydowa sonda radiowa jest w stanie działać samodzielnie i angażować się w różne procesy namierzania, bez konieczności kooperacji z innymi elementami systemu.
- Struktura systemu tomografii radiowej
Przedstawiony system składa się z zespołu szesnastu hybrydowych sond pomiarowych, urządzenia akwizycyjno-nadzorczego, brokera MQTT oraz jednostki obliczeniowej wykonującej rekonstrukcję na potrzeby tomografii radiowej, których zależności prezentuje rysunek 1.
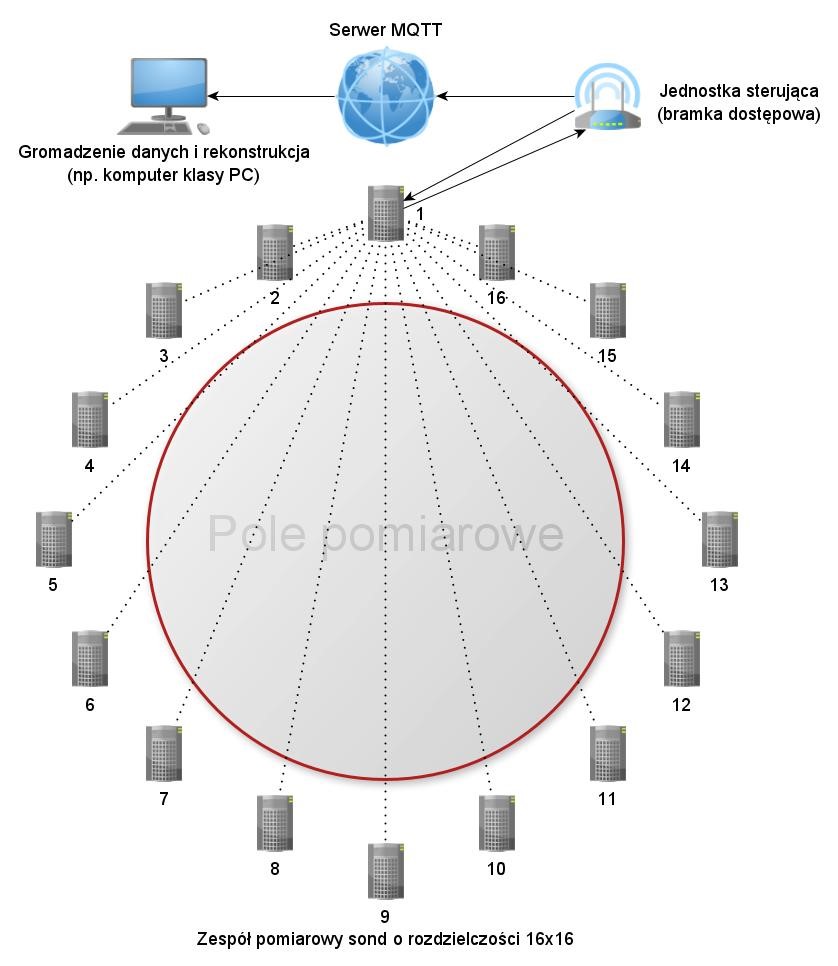
Rys. 1. Struktura hybrydowego systemu nawigacji wewnątrz budynków o rozdzielczości 16×16 (sekwencja pomiarowa dla sondy numer 1)
Pomiary w systemie zachodzą sekwencyjne. Oznacza to, że sondy wykonują operacje pod ścisłą kontrolą centralnej jednostki sterującej, jedna po drugiej, dzięki czemu w przypadku wzrostu poziomu fluktuacji sąsiadujących pól elektromagnetycznych transmisja może zostać ponowiona, a błędy pomiarowe zredukowane. Centralna jednostka sterująca odpowiada także za wstępne formatowanie macierzy pomiarowej i przystosowanie danych (transformacja w standard JSON) do transmisji w kierunku serwera MQTT, a następnie na nośnik danych w dowolnie wybranej platformie obliczeniowej.
- Warstwa sprzętowa
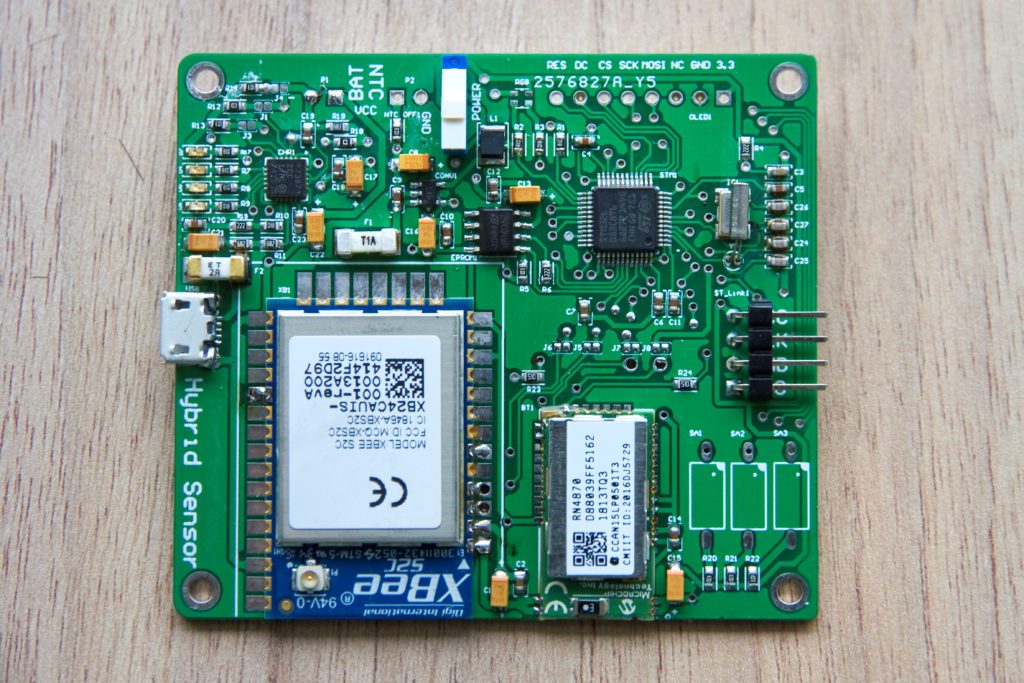
Podstawowym elementem tworzącym sieć nawigacyjną i tomograficzną budynku jest hybrydowa sonda pomiarowa zaprezentowana na rysunku 2.

Rys. 2. Kompletna płytka PCB hybrydowej sondy radiowej
Na konstrukcję składa się kilka wyspecjalizowanych sekcji. Pierwszą widoczną w lewym górnym roku płytki jest zasilacz +3,3 V wyposażony w kontroler ładowania ogniw litowo-polimerowych MCP73871, a także możliwość podłączenia zewnętrznego źródła zasilania o napięciu +5 V przez złącze micro USB (widoczne z prawej strony urządzenia). Do produkcji płytki zastosowano laminat dwustronny, ale pole rewersu płytki zajmują wyłącznie przelotki oraz płaszczyzna montażowa dla baterii LiPo o pojemności 1000 mAh.
Obszar w prawym górnym rogu płytki zajmuje sekcja kontrolno-sterująca, której główny element stanowi mikrokontroler STM32L053C8T6. Jego zadaniem jest wydawać polecania wszystkim pozostałym podzespołom urządzenia, a także zbierać i przetwarzać dane pomiarowe. Zastosowanie mikrokontrolera ARM z rdzeniem Cortex-M0+ pozwoliło na stworzenie układu o bardzo niskim zapotrzebowaniu energetycznym, co ma bezpośredni wpływ na cykl pracy bateryjnej. Po prawej stronie urządzenia wyprowadzono złącze programatora ST-LINK/V2, który może jednocześnie spełniać alternatywną drogę doprowadzającą zasilanie do płytki.
Całą dolną część płytki przeznaczono na sekcję radiową. W celu zabezpieczenia urządzenia przed wpływem zakłóceń warstwa masy została stamtąd całkowicie wybrana, a utworzone w tym celu pola posłużyły do montażu modułów komunikacyjnych takich jak Bluetooth RN4780 z zintegrowaną anteną ceramiczną czy XBee S2C z kierunkową anteną zewnętrzną podłączaną do gniazda U.FL. Wraz z nadejściem technologii Bluetooth 4.2 (obecnej w urządzeniu) stało się także możliwe wykorzystanie protokołu komunikacyjnego TCP/IP.
Całość została ze sobą połączona za pomocą portów szeregowych UART w konfiguracji full-duplex.
Jako element nadzorujący pracę systemu sond hybrydowych posłużył komputer jednoukładowy Raspberry Pi Zero W wyposażony w komunikację Wi-Fi i Bluetooth. Dzięki zamontowaniu specjalnej nakładki rozszerzono także obsługę o standard komunikacyjny XBee. Widok struktury wewnętrznej jednostki sterującej prezentuje rysunek 3. Jako systemu operacyjnego użyto jednej z dystrybucji Linuksa opartej na projekcie Debian, czyli Raspbiana w wersji Stretch. Do stworzenia oprogramowania sterującego użyto języka Python w wersji 2.7.

Rys. 3. Centralna jednostka sterująca z nakładką XBee, obudową i anteną dookólną 2,4 GHz
- Badania
Jako obiekt badań sytemu nawigacyjnego posłużył budynek o charakterze biurowym, a jedno z jego pomieszczeń jako obszar testowy dla tomografu radiowego. Sondy hybrydowe zostały rozlokowane w charakterystycznych punktach kondygnacyjnych na całym ich obszarze. Na rysunku 4 można zaobserwować sposób montażu naściennego części sond hybrydowych w pomieszczeniu przeznaczonym do rekonstrukcji. Ze względu na nieregularności występujące w bryle pokoju, urządzenia rozlokowano na specjalnych obrotowych hakach, co pozwoliło na przeprowadzanie korekt w kątach rozsyłu fal elektromagnetycznych anten kierunkowych zastosowanych w projekcie.

Rys. 4. Kompletna płytka PCB hybrydowej sondy radiowej
Na cokołach pomieszczenia wzdłuż całego obwodu została przeprowadzona instalacja bardzo niskiego napięcia (+5 V) podzielona na dwie sekcje z zasilaczami o wydolności prądowej 4 A każda. Pozwalało to na brak konieczności demontażu system w celu naładowania baterii.
Na rysunku 5 zaprezentowano finalną wersję system nawigacji po budynku. Zaznaczono na niej wszystkie punkty obecności urządzeń. Pomieszczenie o oznaczeniu “Piętro 1 – Biuro 4” to pomieszczenie objęte działaniem tomografu hybrydowego, a jego wyniki rekonstrukcji wraz z mapą ciepła prezentuje rysunek 6.
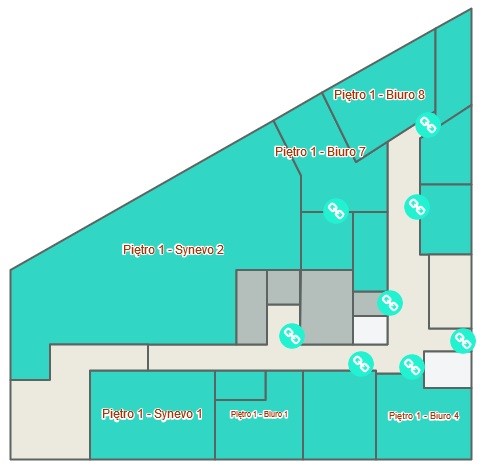
Rys. 5. Fragment aplikacji nawigacyjnej prezentującej jedno z pięter budynku testowego razem z punktami montażu sond hybrydowych
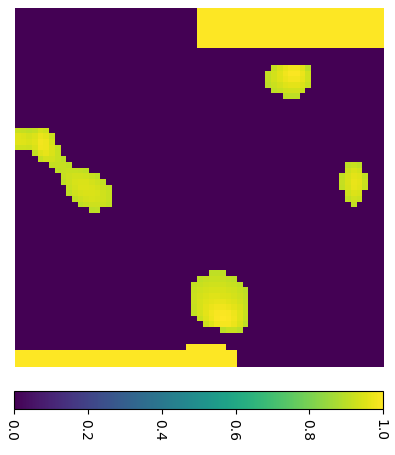

Rys. 6. Rekonstrukcja pomieszczenia i zarejestrowana w niej obecność wraz z mapą ciepła
- Podsumowanie
Badania nad systemem wykazały, że komercyjne technologie radiowe, takie jak Bluetooth, Wi-Fi czy XBee znajdują zastosowanie w zintegrowanych systemach nawigacyjnych wewnątrz budynków i prezentują potencjał do rozbudowy tego typu konstrukcji w przyszłości. Efektywność systemu wzrastała w miarę eliminacji słabości poszczególnych technologii za pomocą zalet pozostałych. Dzięki odpowiedniej kalibracji nadajników i umieszczeniu ich na odpowiedniej wysokości, w niektórych momentach było możliwe stwierdzenie obwodu w pasie osobnika naruszającego obszar badany z dokładnością do kilku cm.
Bibliografia:
- Maj M., Rymarczyk T., Kania K., Niderla K., Styła M., Adamkiewicz P.: Application of the Fresnel zone and Free-space Path for image reconstruction in radio tomography, International Interdisciplinary PhD Workshop 2019, IIPhDW 2019, 15 – 17 May 2019, Wismar, Germany.
- Rymarczyk T., Styła M., Oleszek M., Maj M., Kania K., Adamkiewicz P.: Object detection using radio imaging tomography and tomographic sensors, Przegląd Elektrotechniczny, ISSN 0033-2097, R. 96 NR 1/2020